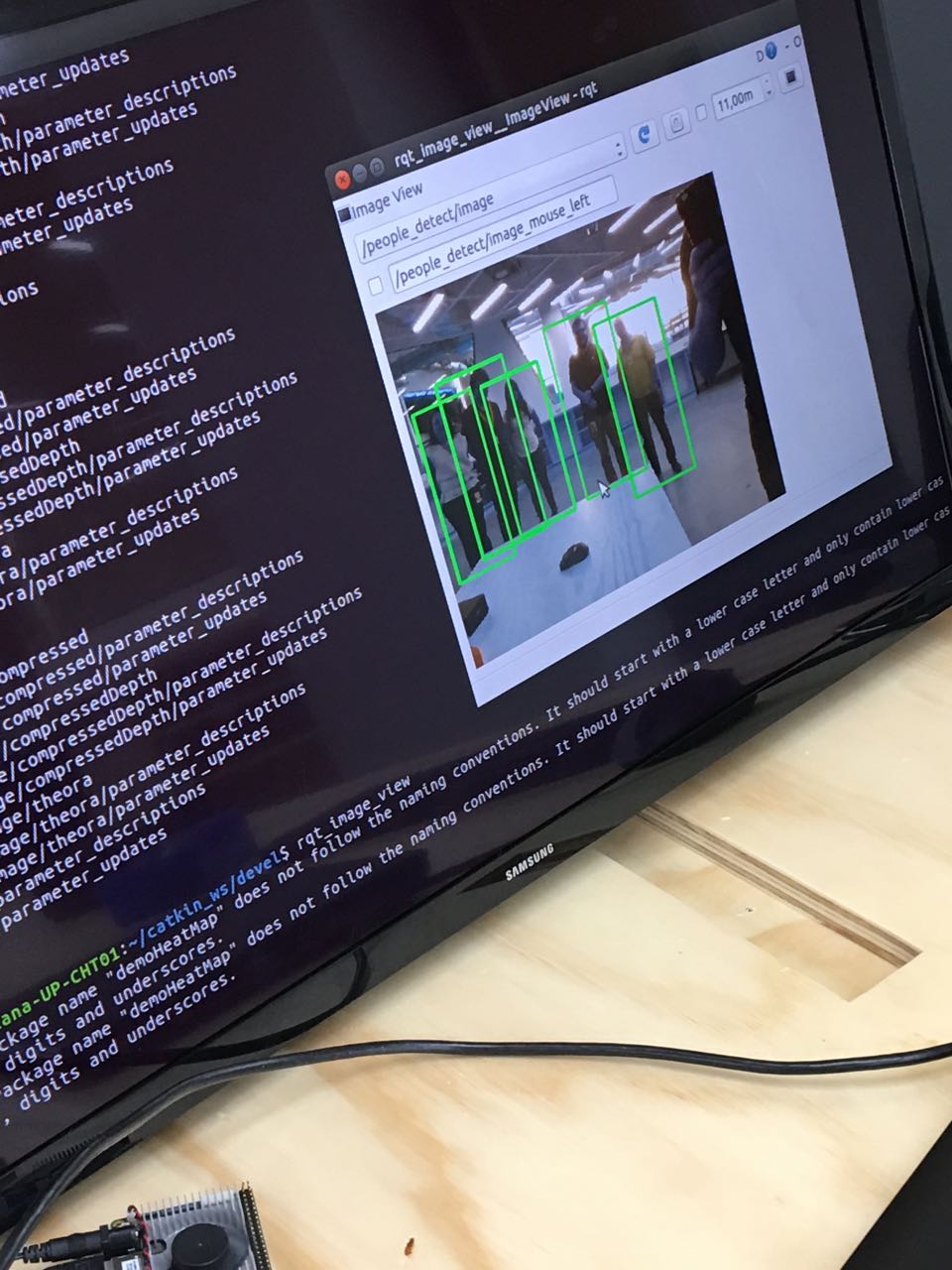
Visión Computarizada: Contando Gente con OpenCV, ROS, UP Board y una cámara Real Sense
En artículos anteriores hemos tocado el tema del kit de robótica de Intel con RealSense y UPBoard. Como seguimiento a las instrucciones de inicio del Up Board les compartimos acá algunos comandos de ROS / LINUX para hacer uso de algunos de los ejemplos para aplicaciones de visión computarizada. PASO 1 – Paquete OpenCV Apps El primer paso... » leer más