
En artículos anteriores hemos tocado el tema del kit de robótica de Intel con RealSense y UPBoard.
Como seguimiento a las instrucciones de inicio del Up Board les compartimos acá algunos comandos de ROS / LINUX para hacer uso de algunos de los ejemplos para aplicaciones de visión computarizada.
PASO 1 – Paquete OpenCV Apps
El primer paso sería la instalación de un paquete de ROS denominado «opencv_apps» mediante el siguiente procedimiento:
cd /opt
sudo apt-get install ros-kinetic-opencv-appsPASO 2 – Ejemplo de la aplicación de detección de personas
El paquete OpenCV Apps de ROS contiene archivos de lanzamiento (.launch files) con ejemplos muy concretos sobre aplicaciones de visión computarizada.
Mediante el siguiente comando de ROS, la consola de LINUX se ubica en la ubicación del paquete OpenCV Apps:
roscd opencv_appsUna vez en este directorio, echaremos un vistazo a la lista de archivos de lanzamiento:
cd launch
ls
El comando ls anterior lista en la consola todos los archivos .launch.
Uno de estos archivos es el denominado «people_detect.launch» el cual contiene las definiciones de ROS (en formato XML) que definen cómo tomar imágenes de una fuente (una cámara por ejemplo) y aplicar los métodos de detección de personas de OpenCV.
Para que este archivo funcione con las cámaras Real Sense, será necesario modificar este archivo «people_detect.launch» de la siguiente manera:
(!) Nota: Este procedimiento será necesario solamente una vez para una misma versión del paquete de ROS OpenCV Apps. Solo será necesario ejecutarlo nuevamente si se actualiza la versión del paquete de ROS OpenCV Apps.
Ejecute el comando gedit para editar el archivo:
sudo gedit people_detect.launchUbique las siguientes líneas en el archivo ver (estado inicial) y cámbielas para que luzcan como se especifica en (estado editado)
(estado inicial)
<arg name="image" default="image" doc="The image topic. Should be remapped to the name of the real image topic." />
<arg name="debug_view" default="true" doc="Specify whether the node displays a window to show edge image" />(estado editado)
<arg name="image" default="camera/color/image_raw" doc="The image topic. Should be remapped to the name of the real image topic." />
<arg name="debug_view" default="false" doc="Specify whether the node displays a window to show edge image" />PASO 3 – Ejecución del ejemplo ROS para detección de personas
Ejecute los siguientes comandos de consola de manera individual, preferiblemente en una pestaña nueva de terminal (SHIFT CTRL T)
1. Iniciar el nodo maestro de ROS
roscore &2. Ubicarse en el directorio de ROS referente a la cámara Real Sense
roscd realsense_camera/3. Lanzar (ejecutar) el procesador ROS de la cámara Real Sense
* Para una R200 use el siguiente comando: roslaunch realsense_camera r200_nodelet_default.launch &
* Para una SR300 use el siguiente comando: roslaunch realsense_camera sr300_nodelet_default.launch &
4. Ejecutar el procesador ROS para el proceso de detección de personas
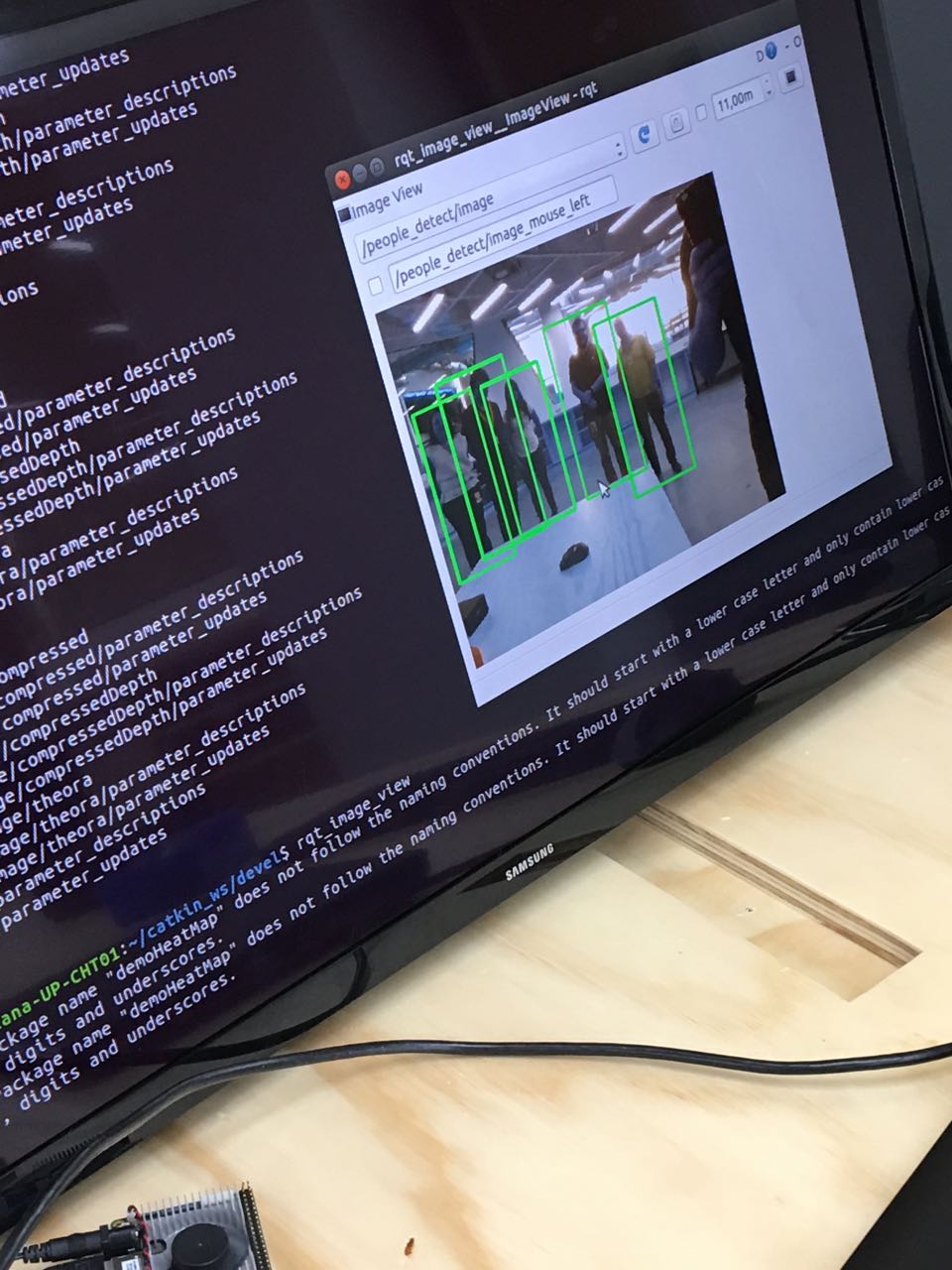
roslaunch opencv_apps people_detect.launch5. Carguemos ahora el visor de imágenes de ROS
rqt_image_view* Este comando abre una ventana que tiene una caja de selección donde podemos elegir el canal que queremos visualizar.
36,100 total views, 1 views today
Comentarios
Buenas noches, puedes pasar un video dando sus explicaciones son paso a paso.
Muy buen articulo, muchas gracias por compartir y ser tan didáctico