
 Recientemente publicamos un primer artículo sobre el kit de robótica de Intel que trae una cámara Real Sense y un Upboard.
Recientemente publicamos un primer artículo sobre el kit de robótica de Intel que trae una cámara Real Sense y un Upboard.
Aunque esta segunda entrega es bastante corta, esperamos que abra las perspectivas de nuestros lectores sobre lo que se puede llegar a hacer con uno de estos kits y los sistemas de robótica ROS y las facilidades que tiene para el manejo de cámaras Real Sense.
Paso 1 (30 min)
Comenzaremos diciendo que instalar Ubuntu y ROS en el Upboard es una tarea súperfacil siguiendo las instrucciones en este enlace:
https://software.intel.com/realsense/robotic-devkit-quickstart
Esto incluye
- Una revisión de materiales incluidos en el kit
(!) Van a necesitar un cable HDMI estándar para conectar el video del UP Board a un monitor, un teclado, un ratón y un adaptador WIFI USB. - La descarga de Ubuntu 16.04.1 LTS
(!) Hoy (FEB18) gracias a las pruebas que está haciendo el profesor Tomás de Camino, vimos que ya la versión de Ubuntu 16.04.1 no está disponible en el enlace oficial que trae la guía de quick start de Intel, sino que fue reemplazada por la 16.04.2. Aunque en la buena teoría deben funcionar igual, en caso de experimientar algun problema con el setup acá les dejamos el enlace oficial a esa versión:
http://old-releases.ubuntu.com/releases/xenial/ubuntu-16.04.1-desktop-amd64.iso - La creación de un USB Stick de instalación
- La instalación del Ubuntu en el UP Board
- La actualización del sistema operativo incluyendo el KERNEL de linux optimizado para el Upboard
(!) En este paso puede que se necesite configurar los servidores APT de Ubuntu para que use los servidores en Estados Unidos (no en Costa Rica) ya que en CR no están los paquetes de ROS. Para esto se abre el menú de búsqueda de Ubuntu y se digita «Software Updates» y en la casilla «Download From» se selecciona «Server from United States»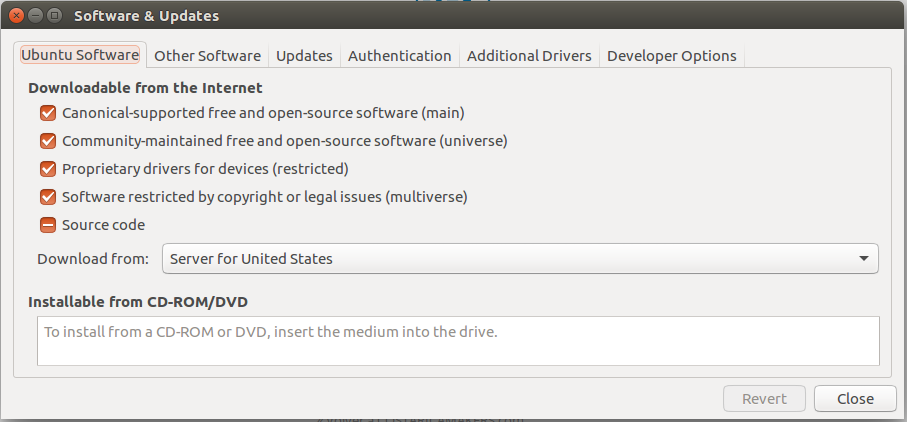
- La actualización del software de Real Sense
- La instalación del sistema ROS en su versión Kinetic
(!) ROS es un «meta-sistema operativo» de código abierto para robots, desarrollado por la fundación de robótica de código abierto. Para aprender más sobre ROS pueden seguir este enlace http://wiki.ros.org/ROS/Introduction - Ejecución de un «Nodelet» de ROS para la cámara Realsense R200
- La ejecución del programa «RVIZ» para visualización 3D
- ¡a celebrar carajo!
Si, eso es todo por ahora.
![]()
Comentarios
Saludos desde Ecuador: Tengo un problema con habilitar los GPIO, con ROS no puedo manejarlos. Gracias de antemano.
Hola Fabricio, ¿Exactamente qué error es el que está recibiendo?