Robot de dos llantas y un micro-controlador S4A-EDU
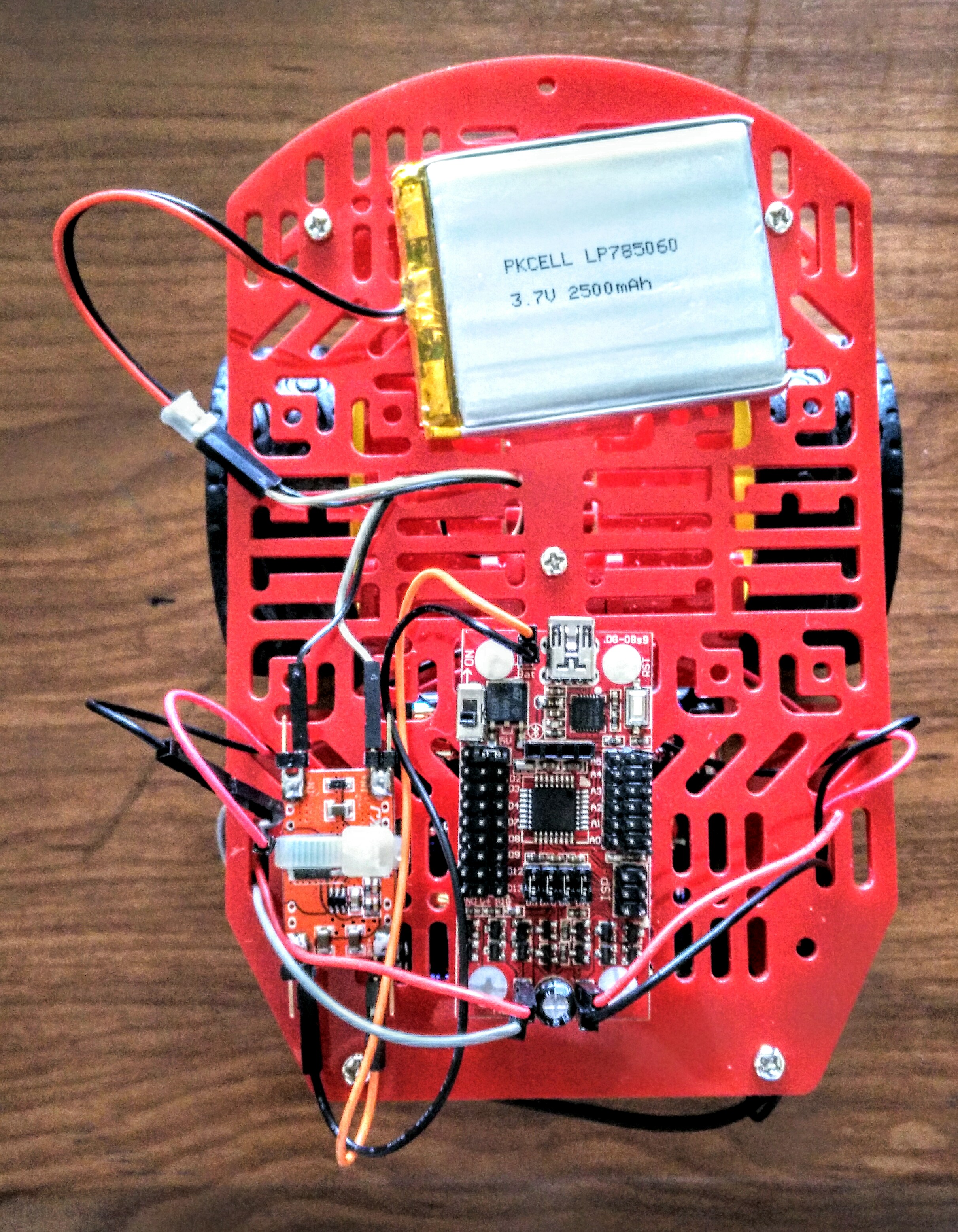
Descripción En este experimento vamos a montar un pequeño robot de dos ruedas que controla su trayectoria mediante la diferencia de velocidad de cada rueda. Para esto utilizaremos un micro-controlador denominado S4A-EDU (Sketch 4 Arduino EDUCATION). El cual implementa la circuitería necesaria para controlar dos motores DC incluyendo la implementación de dos circuitos de «Puente H»... » leer más