
 Resumen
Resumen
Les confieso que esta es mi primera publicación; por pura insistencia de mi editor estamos acá escribiendo. En esta primera entrada discutiremos mi experiencia en Intel en la investigación de cómo programar un robot de dos ruedas mediante diversos micro-c0ntroladores, incluyendo el S4A-EDU, Arduino UNO, Aruduino 101 y Sparkfun Thing.
Detalle
A principios de este año 2017. tuve la bendición de poder pasar unos días en Intel en una experiencia «ad-hoc» de aprendizaje de tecnología, investiación, desarrollo, auspiciada por el Centro de Innovación de Intel y por José Núñez.
En esta experiencia pudimos explorar las diferentes reacciones que que tenia el robot cuando instalábamos diferentes programas (en ARDUINO IDE) con diferente controladores para realizar rutinas como por ejemplo: movilidad hacia adelante y atrás, movimientos con giros con duración específica y también pudimos ver funcionar el acelerometro y giroscópio del chip Intel Curie.
En el fondo nos concentramos en tratar de entender cómo hacer que se mueva el robot (descrito acá) en distintas direcciones y cómo hacer que este pueda tener un movimiento rectilineo preciso, controlado utilizando el giroscopipo disponible en el Intel Curie.
Experiencia con el Acelerómetro de Intel Curie
Comenzamos aprendiendo sobre las diferentes funciones del Intel Curie. Para esto realizamos diversos experimentos descritos en este artículo de Jose Nunez acá en CostaRicaMakers.com.
La verdad me resultó sencillo de utilizar y muy útil para aprender a hacer las lecturas de los diferentes sensores (acelerómetro y giroscópio) y la utilización de las funciones de Blue Tooth Low Energy (BLE)
Experiencia con el Robot de dos llantas y el controlador S4-EDU
La verdad es que comencé con esta experiencia con altas expectativas de lo que podría aprender y hacer. Al principio el primer problema que enfrenté fue aprender un poco de programación, creo que tengo un largo camino por recorrer en esta área.
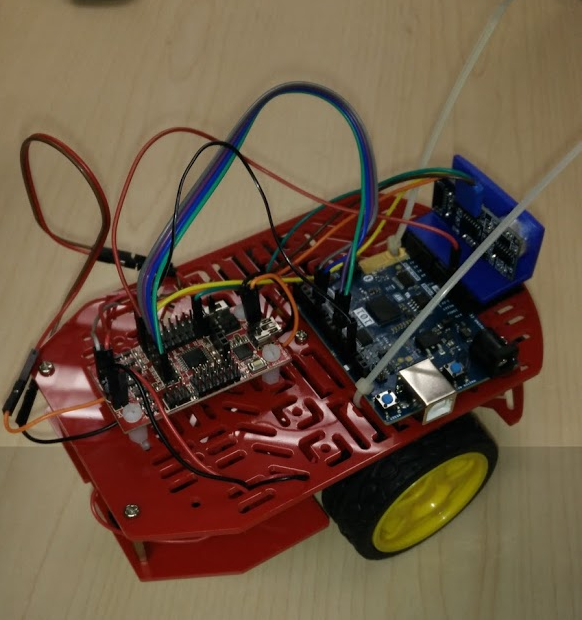
El robot en sí permite realizar movimientos de manera muy versatil gracias a su sistema de dos llantas independientes sobre las que podemos controlar dirección individual y velocidad.
Como mencioné antes fuimos probando diversos controladores, comenzando por el original del kit del robot (el S4A-EDU) que cuenta con un circuito muy interesante denominado «Puente H» (H-Bridge) que nos permite controlar la dirección y velocidad de los motores.
Una vez que pudimos hacerlo moverse usando el controlador original (S4A-EDU) nos dimos a la tarea de reemplazar dicho controlador (parcialmente) con un ARDUINO101 que como dijimos tiene sensores de movimiento (acelerómetro y giroscopio). Para esto pudimos facilmente desconectar el puente H del S4A-EDU y conectarlo al ARDUINO 101.
Como dije antes, el principal reto que enfrentamos fue la programación. Realizamos diferentes tipos de programa usando el ambiente integrado de desarrollo (IDE) de ARDUINO.
Una vez controlado por el ARDUINO 101 para realizar los movimientos básicos, el siguiente reto era comenzar a utilizar el giroscopio para leer cuanto se desviaba hacia un lado u otro el robot al caminar en una misma dirección. Para poder extraer los datos (que son muchos) de las lecturas del giroscopio, tratamos inicialmente de subirlos por WiFi a un servidor en Internet. Pare este fin introducimos un controlador más: el SPARKFUN THING.
La programación del SPARKFUN THING es algo «truculenta» ya que requiere una interfase serial para conectar la laptop donde uno escribe el programa y subirla al micro-controlador. Intentamos con un cable tipo FTDI, pero no tuvimos suerte. En resumen no funcionó por que el cable que teníamos no cuenta con línea DTR… (eso me queda pendiente de entenderlo mejor). Al día siguiente conseguimos otra interfase denomiada «FOCA V1.2» la cual permite comunicación serial con diversas opciones, con y sin línea DTR, a diferentes voltajes (3V, 5V) etc.
Ahora bien, subir datos por via WiFi a un servidor en Internet, el tiempo minimo que toma son 3 o 4 segundos… y el giroscopio generaba datos cada 200ms o menos… o sea, no nos servía la opción del WiFi… fue entonces cuando decidimos cambiar la solución. En vez de guardar los datos en Internet nos avocamos a graficarlos en mi celular usando una conexion Bluetooth Low Energy (del ARUDINO 101). Para esto fue necesario instalar una app en mi celular denominada nRF Toolbox descrita en el artículo mencionado sobre ARDUINO 101.
En este punto logramos que el robot se moviera en una misma dirección durante dos segundos y graficar durante ese tiempo las lecturas del giroscópio cada 200ms.
Control de Velocidad
Aprendí que la velocidad del robot se puede controlar mediante un método que se llama PWM (Pulse Width Modulation) y la idea es utilizar ese principio para ajustar la velocidad de cada rueda para compensar micro-desviaciones del movimiento rectilineo que queriamos lograr. Desafortunadamente no nos dio tiempo de implementar esa parte correctiva.
Conceptos Relacionados
Quiero listar acá algiunos conceptos que me parece importante profundizar en el futuro para mi propio aprendizaje en el área de robótica, tecnología y mecatrónica:
- Variables y Constantes
- Funciones y Métodos
- Pasos e Instrucciones
- Condicionales
- Vibración
- Frecuencia
- Ancho de Pulso
- Voltaje
- Corriente/Amperaje
Agradecimientos
Quiero agradecer a el Señor Jose Núñez por permitirme esta oportunidad de estar en Intel aprendiendo mediante estos experimentos. Sinceramente me ha servido de mucho, tanto para mis estudios como para mi futuro.
![]()
Comentarios